Ewald - der rasende Mähroboter

"Mindestens doppelt so schnell!", sagte uns der Regisseur nach ersten Fahrtproben mit dem geliehenen Mähroboter.
Für eine Filmszene des österreichischen Kinofilms "Rickerl - Musik is höchstens a Hobby", in dem ein Protagonist mit seinem getunten, bierholenden Mähroboter angibt, sollten wir das Geschwindigkeitstuning und die Möglichkeit, das Gerät fernzusteuern, umsetzen.
Es entstand ein unterhaltsames Projekt mit einem sehr schönen Endergebnis.
Filminfos
- Regie: Adrian Goiginger
- Produktion: 2010 Entertainment
- Szenenbild: Enid Löser
- Besetzung: Voodoo Jürgens (Rickerl), Agnes Hausmann (Viki), Ben Winkler (Dominik)
Vorgaben
- Maximales Erhöhen der Fahrgeschwindigkeit
- Roboter muss fernsteuerbar sein
- Umbau zum Biertransporter
- Neue Lackierung
Umbau
Nachdem erste, eher untaugliche Ideen kamen, einfach den Film in doppelter Geschwindigkeit abzuspielen oder ein ferngesteuertes Auto unter das Robotergehäuse zu setzen, sahen wir uns die Möglichkeiten an, den Roboter selbst in seiner Mechanik und Elektronik umzubauen.
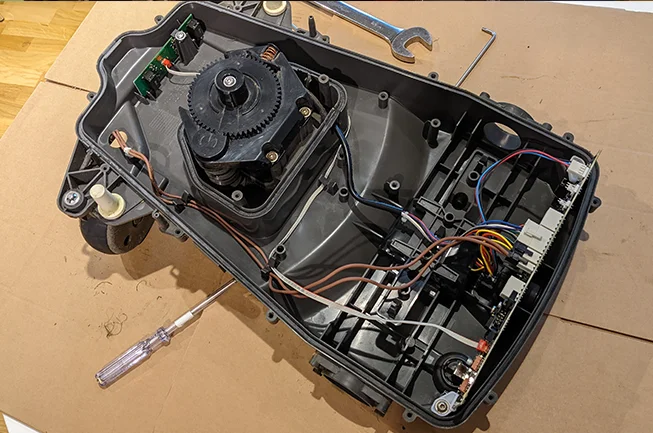
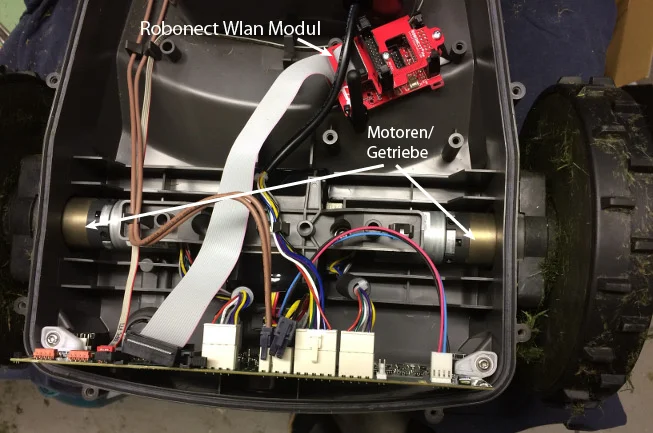
Der verwendete Mähroboter wird von zwei Elektromotoren angetrieben, die unabhängig voneinander mit den Hinterrädern verbunden sind. Die Räder sind starr, das heißt sie schwenken nicht. Die Lenkung wird über die Steuerung der Drehzahl der beiden Motoren geregelt. Die Übersetzung der Motoren erfolgt jeweils über ein doppeltes Planetengetriebe. Wenn wir eine Instanz des Getriebes entfernen, verkürzen wir die Übersetzung und siehe da - der Roboter fährt vieeel schneller!


Steuerung
Der Mähroboter fährt im Normalbetrieb nach einem voreingestellten Programm, eine manuelle Steuerung ist nicht vorgesehen. Um eine Fernsteuerung zu bewerkstelligen, muss das Gerät also elektronisch erweitert werden. Wir verwenden dazu die Platine Robonect HX, die es ermöglicht, den Roboter in ein W-LAN zu integrieren.
Das Web-Interface des Robonect-Moduls bringt einen virtuellen Joystick für die manuelle Steurung mit. Dieser ist allerdings nicht geeignet, den nun rasenden Roboter feinfühlig genug steuern zu können.
Deshalb analysieren wir die HTTP-Requests die von der Robonect-App gesendet werden und programmieren auf einem Raspi eine geeignete Schnittstelle mit Node.js.
Als Gerät zur Fernsteuerung verwenden wir einen alten Playstation-Controller, den wir zur stabilen Datenübertragung per USB-Kabel an den Raspi hängen. Wir binden diesen als Human-Interface-Device (HID) ein. Mit seinen beiden Daumen-Joysticks funktioniert die Steuerung wunderbar und präzise genug.
Fake User Interface
Zur im Film "gefakten" Steuerung ist auch noch ein Interface für ein Smartphone notwendig. Dieses programmieren und designen wir filmgerecht - per Touch- und Sprachsteuerung kann nun der Schauspieler seinem "Ewald" Kommandos geben.
In Action
Nachdem unser Roboter nun auch noch mit einer frischen Lackierung versehen wurde und auch noch Halterungen für zwei Bierdosen oder -Flaschen montiert sind, geht es zum Filmset. Alles klappt. Ewald flitzt durch den Garten und holt auf Befehl Bier aus seiner Garage.


Seht euch den Film an - sehr empfehlenswert! Wir legen auch, dazu passend, den Blogeintrag Virtuelle Slotmachine mit JavaScript ans Herz!